山东先进院提出一种用于电动汽车电机控制器的角度位置补偿方法
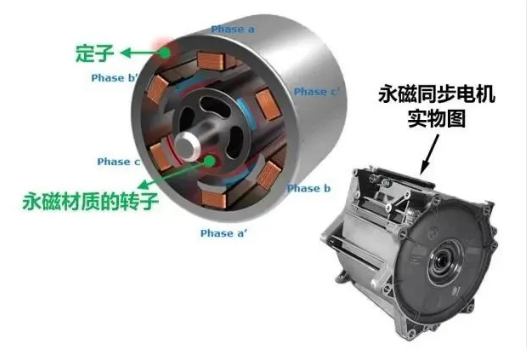
目前,国内大多数电动汽车采用的是功耗较低但制造成本相对较高的永磁同步电机,如比亚迪、北汽新能源、吉利汽车等。其中,车辆的舒适性一定程度上受到电机扭矩波动的影响,而电机扭矩的精度则依赖于位置传感器的信号质量。
为此,山东先进院电动汽车研究中心提出了一种用于电动汽车的车载高速永磁同步电机的针对位置传感器的角度补偿方法。中心副主任邵壮介绍,该方法可以提高位置精度,保证电机扭矩精度,从而进一步提高车辆的稳定性和舒适性。位置传感器的偏差通常出现在哪些方面?“一种是在实际电机生产过程中,安装位置传感器时会产生偏差,这种偏差一般在测试台架上通过微调来进行校正。”邵壮介绍,“另外一类偏差是在实际电机控制器中因角度解码芯片产生延迟,以及程序算法带来的延时所导致的。这类偏差在电机高速运行时表现明显,需要考虑从控制算法、芯片运算能力等方面综合补偿该角度值。”
基于以上偏差现象,邵壮团队通过分析电机物理模型,深度剖析了永磁同步电机的控制算法原理,对PWM(脉冲宽度调制)的中断时序图进行细化拆分,分析出了实际芯片的运行时序,通过5个步骤,找到了PWM信号的真实执行时间点,进而总结并提出了转子角度补偿的具体实施方法,可以另转子位置传感器的读取数据更精确。
据介绍,现在通常的电机控制程序中并没有对因芯片采样导致的角度误差进行补偿。本方法中,芯片传递给逆变单元的控制指令中的位置信息是当前的实际位置,不再是上一个半PWM周期采集到的位置,从而得到更高的控制精度。
经过实际测试,利用此角度补偿方法,电机在不同转速、扭矩运行区间内,其扭矩精度均得到了一定程度上的改善。尤其是在电机高转速情况下,采用该补偿方法后电机的扭矩平顺性更好,增强了电机运行时的动态性能和稳定性,从而可以提高车辆的稳定性和舒适性。